 首页
首页 站长新闻
站长新闻 蔡司历史
蔡司历史 给我留言
给我留言 免费资源
免费资源 蔡司视频
蔡司视频 经验心得
经验心得

-
请关注上方“三蔡技术交流论坛”或长按关注,获取更多内容

“基本坐标系匹配”俗称“蛙跳”,一般常见于关节臂、激光跟踪仪之类的移动式测量机,固定式测量机在两种情况下也需要此项功能:1、零件测量一部分后发生了位移,位移前后测量的元素需要关联计算;2、零件超出机器量程,需要分段测量。使用“基本坐标系匹配”功能可以使位移前已经测量的元素不用重新测量而与位移后测量的元素构成完整数据链,进行统一特性计算。
蛙跳检测的基本原理: 通过三个(或以上)点(可以是标准球,可以是测球,可以是产品的孔)拟合建立坐标系。然后建立的坐标系和基本坐标系匹配(平移旋转),再保持已有测量结果不变化情况下,测量新基本坐标系下的其他元素,然后进行单要素特性和多要素特性的评价(尺寸,距离,形位公差等)。
说明:
整个测量过程中,始终只存在一个基本坐标系。每次蛙跳,覆盖上次基本坐标系。若干次蛙跳后,基本坐标系就是最后一次蛙跳计算得到的基本坐标系。
一次测量中可以使用多次蛙跳,但随着“蛙跳”次数越多,测量误差越大。
下面举例说明该功能的使用方法及测量精度:
一. 正常建立“基本坐标系”及“安全平面”,并且测量“圆1”评价出XY坐标值;

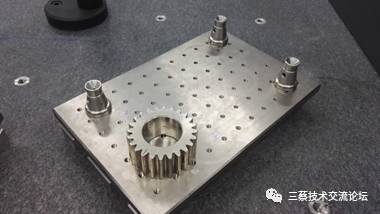
二. 将3个“定位器”吸在夹具上;

三. 手动在每个“定位器”上测量一点并设为“自定心”点,自动运行一遍;
自定心相关内容参考文章:
Calypso应用之自定心原理介绍
Calypso应用之自定心稳定性测试

四. 人为将零件位置移动和偏转模拟产品发生移动;
五. 点击“资源”→“其它”→“基本坐标系匹配”,再点击“选择元素”,选中之前3个“自定心”点,最后确定
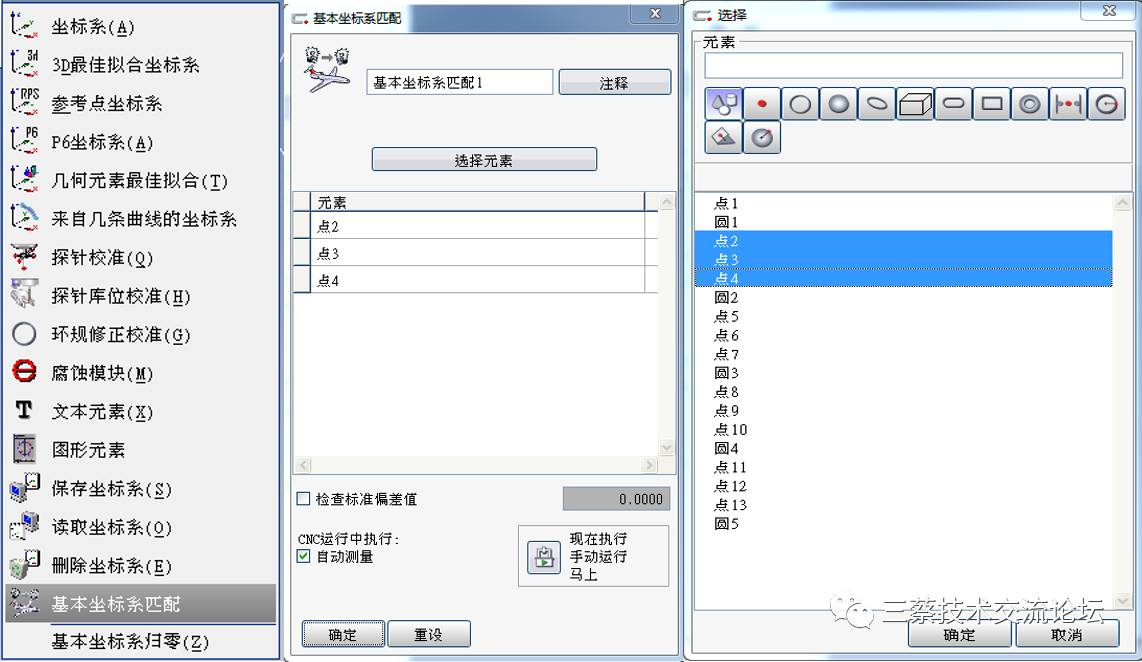
六. 确定后会跳出提示框要求手动将3个“自定心”点依次测一遍(顺序不能错)
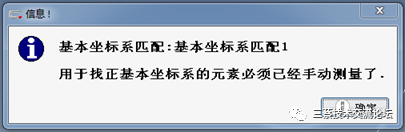
七. 手动测量后将探针抬高,点击确定后会自动将这3个点再次测量一遍,这时位移前后的数据就连接起来了,可以将“圆1”复制一个为“圆2”再测量一次,如此再重复3遍后,“圆1”位移了4次;



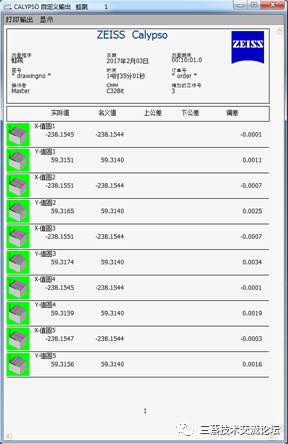
八.最终得出5组数据,在“CAD窗口”中5个位置都重合在一起。如下是5次结果,重复性精度很好

注:
如果“定位器”完全固定于夹具上,则此程序完全可以自动运行,注意运行顺序必须设置为“按特性列表”

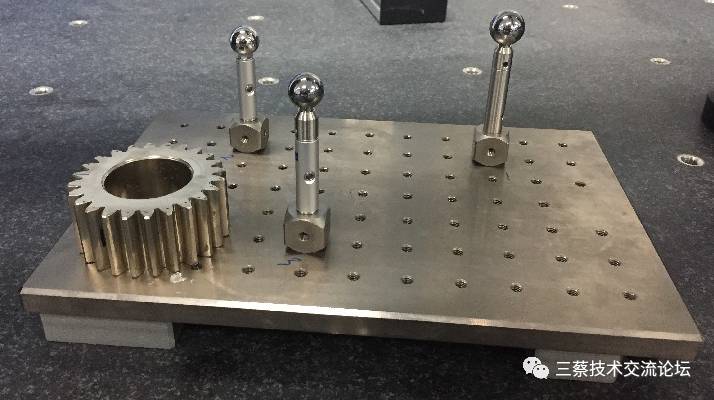
“基本坐标系匹配”功能使用“定位器”可以充分发挥蔡司的“自定心”功能,既方便也保证精度,当没有“定位器”时可以使用3个球或3个带“工作平面”的圆(推荐使用3个球),3个球心或圆心高度可以不一样(如下图),依然可以使用“基本坐标系匹配”功能。
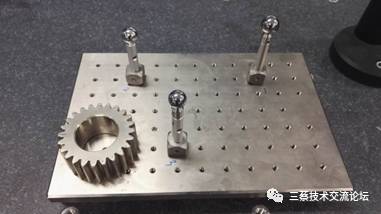
附视频:两次蛙跳测量视频
使用三个钢球(直径15-20左右)拟合坐标系。齿轮中心孔作为被测圆。分别输出蛙跳前XY坐标和直径
第一次蛙跳
第二次蛙跳来源:虞军博客(微信/QQ号:18136545850/924002502),转载请保留出处和链接!
本文链接:http://www.mark-yu.com/post/308.html
文章底部广告(PC版)
-
<< 上一篇下一篇 >>
本文标签:
微信号:18136545850
加入【蔡司三坐标交流论坛】QQ群:376426921(加群验证:虞军博客)
这里的内容可以随意更改,在后台-主题配置中设置。
Calypso应用之"基本坐标系匹配”功能使用
人参与 2017-09-26 22:34 分类 : 应用初级篇 评论

搜索
-
网站分类
-
Tags列表
-
最新留言
-
我是标题
-
-
内容的形式各种各样,可以是文本,也可以是各种广告等。
Copyright Your WebSite. Mark Rights Reserved.